
CAN舒適/Infotainment數(shù)據(jù)總線的差動(dòng)數(shù)據(jù)傳遞
2019-05-28 11:05:01
root
為了使低速CAN抗干擾性能強(qiáng)切電流消耗低,與CAN驅(qū)動(dòng)數(shù)據(jù)相比就需要做一些改動(dòng)。
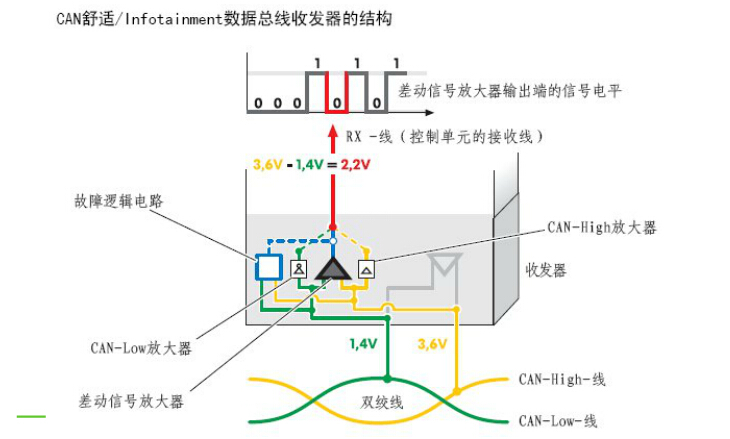
首先,由于使用了單獨(dú)的驅(qū)動(dòng)器(功率放大器),這兩個(gè)CAN信號(hào)就不再有彼此以來的關(guān)系了。與CAN驅(qū)動(dòng)數(shù)據(jù)總線不同,CAN舒適/Infotainment數(shù)據(jù)總線的CAN-HIGH線和CAN-LOW線不是通過電阻相連的。也就是說:CAN-HIGH線和CAN-LOW線不在彼此相互影響,而是彼此獨(dú)立作為電壓源來工作。
另外還放棄了共同的中壓,在隱性狀態(tài)(靜電平)時(shí),CAN-HIGH信號(hào)為0V,在顯性狀態(tài)時(shí)≥3.6V。
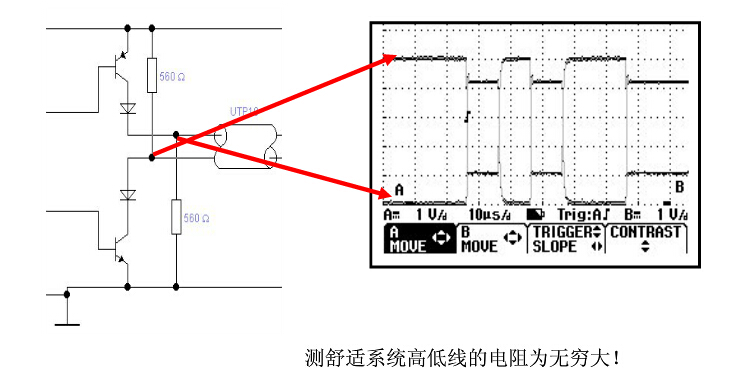
對(duì)于CAN-LOW信號(hào)來說,隱性電平為5V,顯性電平≤1.4V,于是在差頻信號(hào)放大器內(nèi)相減后,隱性電平為-5V,顯性電平為2.2V,那么隱性電平和顯性電平之間的電壓變化(電壓提升)就提高到≥7.2V。
由于電壓電平和電阻配置不同,所以在CAN驅(qū)動(dòng)數(shù)據(jù)總線和CAN舒適/Infotainment數(shù)據(jù)總線之間無法進(jìn)行耦合連接,另外這兩種數(shù)據(jù)總線的傳輸速率不同,這就決定了他們無法使用不同的信號(hào)。這就需要在這兩個(gè)系統(tǒng)之間能完成一個(gè)轉(zhuǎn)換,這個(gè)轉(zhuǎn)換過程是通過網(wǎng)關(guān)來實(shí)現(xiàn)的,根據(jù)車輛的不同,網(wǎng)關(guān)可能安裝在組合儀表內(nèi),車上供電控制單元內(nèi)貨在自己的網(wǎng)關(guān)控制單元內(nèi)。
